线程同步:锁、Condvar 和信号量
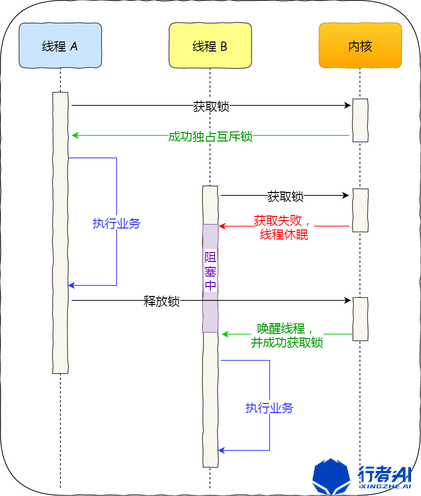
Mutex 锁🔒
use std::sync::{Mutex}; fn main() { let m = Mutex::new(0); { let mut lock = m.lock().unwrap(); // | ^^^^^^^ 使用lock方法向Mutex申请锁 // | lock方法调用时会阻塞当前线程,直到获取到锁 // ^ 获取到了锁。 // 因此当多个线程同时访问该数据时, // 只有一个线程能获取到锁,其它线程只能阻塞着等待, // 直到这个锁被当前线程释放,其他某一线程才可获取到这个锁 *lock = 1; // ^^^^^^ 修改被锁保护的值 } // ← 当 lock 离开作用域后。lock被自动drop。锁被释放 println!("{:?}", *m.lock().unwrap()); }
单线程死锁
use std::sync::{Mutex}; fn main() { let m = Mutex::new(0); let mut lock1 = m.lock().unwrap(); *lock1 = 1; // ^^^^ lock1 没有被drop // drop(lock1); // ^^^^ 除非手动销毁锁 { let mut lock2 = m.lock().unwrap(); // ^^^^ lock1 没有被drop 就申请第二把锁 *lock2 = 2; } println!("{:?}", m); }
总结: 只有再上把锁被drop后才能再次获取锁,否则将造成死锁。
多线程间修改数据(共享所有权)
use std::sync::{Arc, Mutex}; use std::thread; use std::thread::sleep; use std::time::Duration; fn main() { let counter = Arc::new(Mutex::new(0)); let mut handles = vec![]; for _ in 0..10 { let counter = Arc::clone(&counter); let handle = thread::spawn(move || { let mut mun = counter.lock().unwrap(); *mun += 1; }); handles.push(handle); } for handle in handles { handle.join().unwrap(); } println!("{:?}", *counter.lock().unwrap()); }
总结:
Rc<T>和RefCell<T>用于单线程内部可变性;Arc<T>和Mutex<T>用于多线程间的内部可变性。
多线程死锁
use std::sync::{Arc, Mutex}; use std::thread; use std::thread::sleep; use std::time::Duration; fn main() { let mut handles = vec![]; let counter1 = Arc::new(Mutex::new(0)); let counter2 = Arc::new(Mutex::new(0)); let counter1_ = Arc::clone(&counter1); let counter2_ = Arc::clone(&counter2); handles.push(thread::spawn(move || { let a = counter1.lock().unwrap(); // 锁定 counter1 sleep(Duration::from_millis(100)); let b = counter2.lock().unwrap(); // 尝试锁定 counter2 但 counter2 已经被锁定 println!("1"); })); handles.push(thread::spawn(move || { let a = counter2_.lock().unwrap(); // 锁定 counter2 sleep(Duration::from_millis(100)); let b = counter1_.lock().unwrap(); // 尝试锁定 counter1 但 counter1 已经被锁定 println!("2"); })); // 两个线程互相等待 形成死锁 for handle in handles { handle.join().unwrap(); } println!("end") }
try_lock
避免多线程死锁。使用try_lock代替lock。
use std::sync::{Arc, Mutex}; use std::thread; use std::thread::sleep; use std::time::Duration; fn main() { let mut handles = vec![]; let counter1 = Arc::new(Mutex::new(0)); let counter2 = Arc::new(Mutex::new(0)); let counter1_ = Arc::clone(&counter1); let counter2_ = Arc::clone(&counter2); handles.push(thread::spawn(move || { let a = counter1.lock().unwrap(); // 锁定 counter1 sleep(Duration::from_millis(100)); // let b = counter2.lock().unwrap(); if let Ok(b) = counter2.try_lock() { // ^^^^^^^^ 使用try_lock替代lock println!("handle1 v = {}", b) } else { println!("handle1 get counter2 error") } println!("1"); })); handles.push(thread::spawn(move || { let a = counter2_.lock().unwrap(); // 锁定 counter2 sleep(Duration::from_millis(100)); // let b = counter1_.try_lock(); let b = match counter1_.try_lock() { Err(e) => println!("handle2 get counter1 error {}", e), Ok(v) => println!("handle2 v = {}", v) }; println!("2"); })); for handle in handles { handle.join().unwrap(); } println!("end") }
RwLock
只读
多个只读不会阻塞线程。
use std::sync::{RwLock}; fn main() { let counter = RwLock::new(0); let a = counter.read().unwrap(); let b = counter.read().unwrap(); // ^^^^^ 可以使用 try_read 替代 // 多个只读不会阻塞线程 println!("a = {}, b = {}", a, b); }
可写
多个可写同时存在会阻塞线程。
use std::sync::{RwLock}; fn main() { let counter = RwLock::new(0); let mut a = counter.write().unwrap(); *a += 1; println!("a = {}", *a); // drop(a); // 手动drop 释放写入锁 let mut b = counter.write().unwrap(); // ^^^^^ 可以使用 try_write 替代 *b += 1; // 但是多个写入锁会阻塞 println!("end") }
使用条件变量Condvar控制线程的同步(执行顺序)
use std::sync::{Arc, Mutex, Condvar}; use std::thread; use std::thread::sleep; use std::time::Duration; fn main() { let park = Arc::new((Mutex::new(false), Condvar::new())); let park_clone = Arc::clone(&park); // 创建子线程 let handle = thread::spawn(move || { println!("child thread start"); let (park_lock, park_cond) = &*park_clone; let mut lock = park_lock.lock().unwrap(); let mut counter = 0; // 子线程循环3次 while counter < 3 { println!("a"); while !*lock { // 当锁为false时进入循环 // ^^^^^^^^^^^^ 这里为什么要用while循环? // 是为了防止虚假唤醒 // 说白了就是,线程会被wait()唤醒, // wait()方法会重新获取锁时但并不意味着 *lock 的值已经变为true了 // 所以需要用while循环来确保 *lock的值为true时才继续向下执行 println!("b"); // 被唤醒后会自动重新获取锁 lock = park_cond.wait(lock).unwrap(); // 等待notify_one // ^^^^ wait方法 会先释放锁,这样其他线程就可以获取锁了 // 然后再阻塞当前线程,直到被notify_one()或notify_all()唤醒 // 当其他线程调用notify_one()或notify_all()时,当前线程会重新获取锁,并继续执行循环 } println!("c"); // 条件满足后,重置条件为false,准备下次等待 *lock = false; println!("child thread #{}", counter); counter += 1; } }); let mut counter = 0; let (lock, cond) = &*park; while counter < 3 { sleep(Duration::from_millis(1000)); // 等待1秒 *lock.lock().unwrap() = true; // 设置条件为true,表示条件满足 cond.notify_one(); // 通知等待的线程(子线程)条件已满足 println!("main thread loop {}", counter); counter += 1; } // 等待子线程完成 handle.join().unwrap(); println!("end") }
信号量(限制并发任务的数量)
推荐使用tokio
[dependencies]
tokio = { version = "1.48.0", features = ["full"] }
use std::sync::{Arc}; use std::time::Duration; use tokio::sync::Semaphore; #[tokio::main] async fn main() { let semaphore = Arc::new(Semaphore::new(3)); // 创建一个最多同时允许三个线程的限制 let mut handles = vec![]; for i in 0..10 { let semaphore_clone = Arc::clone(&semaphore); handles.push(tokio::spawn(async move { let permit = semaphore_clone.acquire_owned().await.unwrap(); tokio::time::sleep(Duration::from_millis(1000)).await; println!("spawn thread, {}", i); drop(permit); // 释放信号量许可 // 其实这里可以不需要显式的drop, 因为permit会在作用域结束时自动释放 // 但是为了代码的清晰性,增强语义,显式的drop还是更好一些 })); } for handle in handles { handle.await.unwrap(); } }